Improving the Efficiency of Soft Phase-Change Actuators Using Thermodynamic Analysis
Luke F. Gockowski, Charles Xiao, Amy Hao, Yangying Zhu, Bolin Liao, Megan T. Valentine, Elliot W. Hawkes. Soft Robotics (2025)
Abstract
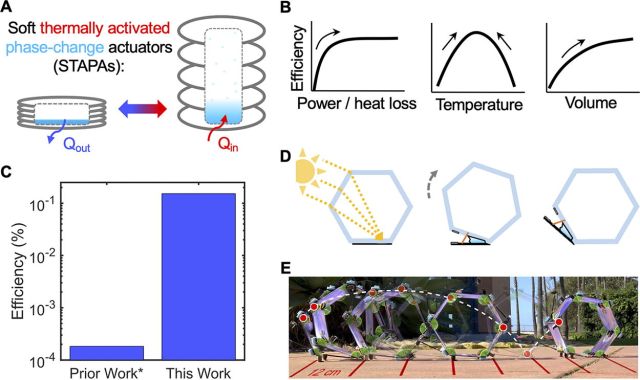
Actuation is a key challenge for the field of soft robotics. One method of actuation, thermally driven liquid-to-vapor phase change heat engines, is particularly compelling due to its high forces, large strokes, and relative simplicity. However, this form of actuation suffers from a very low efficiency, making its impact for practical applications limited. Here we apply thermodynamic analysis to these phase-change actuators to identify major inefficiencies and offer three key insights that soft roboticists can leverage to improve efficiency: (1) maximize the ratio of input power to heat loss, (2) operate at an intermediate temperature, and (3) maximize volumetric expansion. We confirm the validity of these insights via benchtop experiments and show efficiencies nearly two orders of magnitude higher than previously reported. We demonstrate the usefulness of these insights by applying them to the design and construction of a compliant roller powered directly by sunlight and capable of rolling every 16 s. Our results guide the design of more efficient phase-change actuators for soft robots and more generally, demonstrate the potential of applying thermodynamic analysis to improve the efficiency of soft actuators.